si tutto giusto,
intanto se puoi mettere una foto o la sigla dell^encoder che hai ora sulla macchina magari riesco ad aiutarti, la macchina avra^ i suoi anni non c^eran poi tantissimi produttori di encoder si dovrebbe risalire a cos^e^
Per incominciare a darti un^idea di come procedere , per prima cosa va trovata l^alimentazione, gnd e +v poi avrai altri 4 o 5 fili, come ti e^stato detto , A+ A- B+ B- e se cê^il quinto filo e^lo 0 (Z) che il driver non usa , cerchiamo di trovarecon certezza l^alimentazione e non per tentativi anche se a mia esperienza tutti gli encoder son protetti per errore cablaggio, magari il sistema di origine non funziona ma, l^ alimentazione encorder c^ ê^ misuri col tester e segui i fili.
solo per dare tutte le info il segnale Z serve a certi controlli per tenere in memoria la posizione quando si stacca corrente, la macchina memorizza posizione allo spegnimento poi, al riavvio sposta gli assi avanti o indietro di quel poco che serve fino ad avere il segnale Z e somma o sottrae a seconda di come ha fatto il movimento i passi contati fino a Z al contatore memorizzato ed ora la macchina sa^dove e^esattamente tutto questo senza sia necessario rifare Home
Esisterebbero su certi encoder anche C D ecc non credo proprio sia il tuo caso
Come trovare i segnali, se hai un oscilloscopio e^facile, 2 traccie piu^facile 4 tracce facilissimo
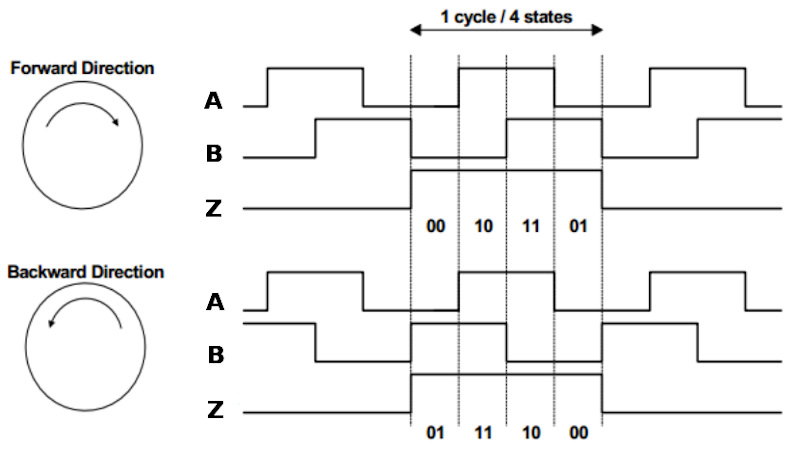
questa sopra e^la raffigurazione segnali di un encoder
come vedi a seconda del verso in cui gira A e B si invertono, cosi^il driver sa da che parte sta andando; contando gli impulsi sa^di quanto si sta spostando
in verita^per aumentare la risoluzione il Driver conta tutti i fronti di salita e discesa di A e B praticamente moltiplica per 4 la risoluzione encoder, NON e^una moltiplica elettronica come i micropassi di uno stepper e^una reale posizione fisica del disco ottico
Z e^ rappresentata , fregatene non ti serve pero, se lo trovi tra i fili sai come distinguerla dagli altri
A e B negati ossia segno - a cosa servono? per il normale funzionamento a nulla, esistono solo per controllo sicurezza; in caso di disturbi che potrebbero alterare un segnale il driver guarda anche il suo segnale ^specchio^ se trova incongruenze tra i 2 sa^che cê^ un errore, i driver di solito sono in grado di correggere con una certa tolleranza spesso impostabile via software poi oltre un tot segnala errore e si ferma
I gecodrive ,i vecchi cinesi fuori produzione ed i rhino indiani non leggono A e B negati, molto bene che hai speso per dei driver che invece li usano, un disturbo sulla linea non compreso dal driver lo fa^partire al massimo in inseguimento per recuperare un errore che in effetti non cê^ , grossi servomotori riescono ad esprimer coppie e velocita^tali da esser veramente pericolosi col doppio controllo si elimina il problema, poi quando farai il tuning col software eventuali picchi di errore li vedrai nei grafici ed in un contatore e li^ vedrai eventualmente come eliminarli con distribuzione masse ,schermature e ferriti, ti dico gia^che comunque e^molto raro che ci siano.
pero^proverai ad attaccare e staccare l elettomandrino ed altri utilizzatori per vedere che succede, una prova grezza ma efficace per vedere l îmmunita^disturbi e^mettersi a saldare ad elettrodo vicino alla macchina, se non entra nessun disturbo vuol dire che hai un sistema granitico.
Bon vediamo come trovare i segnali con un tester
Devi innanzitutto fare in modo di poter far girare pochissimo e con precisione l^encoder, e^plausibile che per ogni mm di movimento ci siano almeno 1000 inpulsi encoder quindi ogni 0,36 gradi cominci a misurare un segnale rispetto a massa , mettiamo che trovi A+ ,gli altri tre saranno uno a 0 che dovrebbe essere A- e gi altri due che potrebbero essere a +5V o a 0 , quello che nel momento che ruoti di pochisismo cambia da 0 a +5 mentre A va da +5 a 0 e^il suo antagonista ossia A- quello che sale da 0 a 5 mentre A resta a 5 e^B+ e quel che ti resta e^per forza B-
In tutta questa procedura potremmo aver fatto l êrrore di pensare che A sia B e viceversa NON e^un problema, l âsse invece di andare a SX andra^a SX;per correggere o imposti sul software di controllo il segnale DIR da positivo a negato o scambi le coppie di A e B encoder nel cablaggio ,di fatto e^solo una convenzione, per il driver non cambia nulla.
Si potrebbe senza misurare andar per tentativi, se colleghi sbagliato il driver appena prova a muovere il motoreva^in errore, si scambiano fili finche^ non succede piu^,e^fattibile ma non e^un bel modo di lavorare.
Adesso dobbiamo saper quanto impulsi giro ha questo encoder be^, e^ sulla vite della vite misuri in un giro di quanto si sposta , mettiamo che fa^1mm giro, impostiamo con un valore comodo di partenza il valore risoluzione sul driver, mettiamoci 1000, quindi se gli dico di spostarsi di 1000 passi dovrebbe fare 1mm , ne fa^2 be^allora divido l^encoder deve essere per forza da 500, ne^fa^ 0,25 e allora l êncoder e^da 4000.
ecco magari invece che 1mm ne leggi 0,99 non preoccuparti numeri strani sono errori di misura gli encoder sono di scale di impulsi ben definiti, ci son da 100,200,250,360(questo e i suoi multipli esiste per misure angolari,difficile che ti capiti) 500 ,1000 ,2000,4000 ecc quindi se ti ritrovi uno scostamento minimo della misura arrotondi e poi fai i calcoli.
Ho scritto un poema ma ora dovresti avere tutte le info per venirne a capo anche con un encoder sconosciuto, alla fine vedrai che la procedura e^piu^facile a farsi che a dirsi







