Purtroppo sono insorti una serie di problemi.. Sarei davvero grato di un aiuto
A fine post metto la mia configurazione
I problemi riscontrati sono 5 principalmente,
1) i motori sono scaldati parecchio, tecnicamente sono da 3A,ma 3A rms o 3A picco? chiedo perchè nei driver chiede la corrente di picco da calcolare come corrente rms x 1.4.
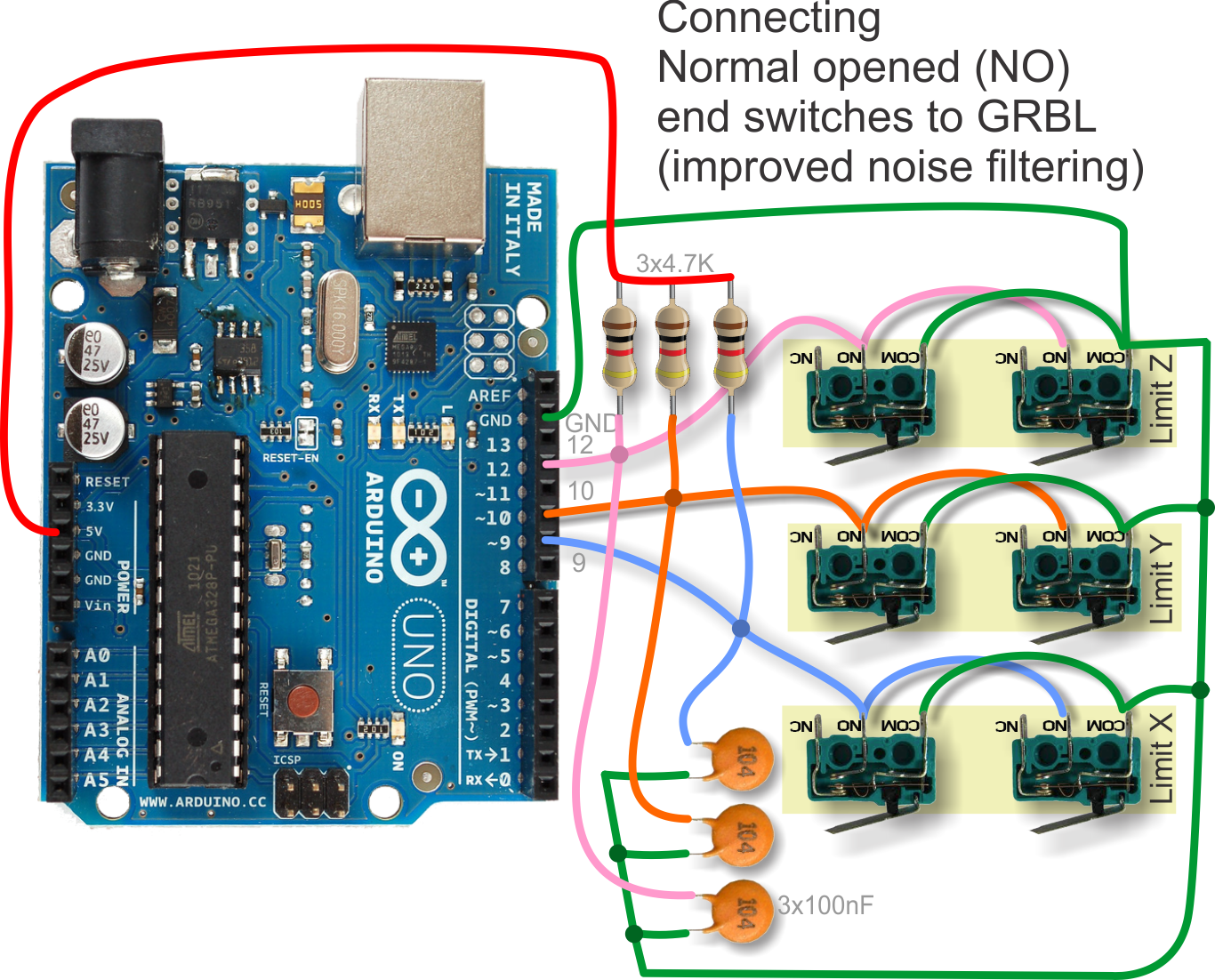
2)non mi funzionano gli switch dei limiti, possibile perchè non ho utilizzato le resistenze? uso arduino come controller. Quando attivo i soft limit o gli hard va in allarme ed ha problemi a comunicare con arduino
3)potreste spiegarmi come calcolare gli step/mm con le cinghie?
4)nei driver nella posizione sw4 c'è uno switch per Standstill current setting, dovrebbe essere la corrente quando i motori sono fermi? come opzioni c'è full ed half
5): quando la porta enable, dei driver, viene alimentata i motori girano liberi e non funzionano e grbl va in alarm, quando viene aperto il circuito si accendono.. e vanno in coppia. normale?
Arduino uno con GRBL
Alimentatore 36v 9.7A
Motori
57BYGH115-003B Dual shaft NEMA23
Step Angle: 1.8 degree
Voltage: 6.3VDC
Current: 3 A/phase
Resistance: 2.1Ohm/phase
Inductance: 9mH/phase
Holding torque: 30Kg-cm 428oz-in
Rotor inertia: 810 g-cm2
Detent torque: 0.89 kg-cm
Number of wire leads: 4
driver
DQ542MA
https://www.hobbytronics.co.za/Content/ ... Manual.pdf